
Come controllare un servomotore con Raspberry Pi
ⓘ Cet article peut avoir été partiellement ou totalement traduit à l'aide d'outils automatiques. Nous nous excusons des erreurs que cela pourrait engendrer.
Questo tutorial è la terza parte di un file dedicato alla scoperta dell'elettronica con il Raspberry Pi. Se non l'hai letto, ti consiglio di consultare il primo tutorial per controllare un LED con il Raspberry Pi così come il secondo tutorial per utilizzare un lettore RFID con il Raspberry Pi.
Quando si avvia la domotica, un'esigenza classica è controllare il movimento fisico nella realtà da un programma.
In questo tutorial vedremo come utilizzare il Raspberry Pi per controllare un servomotore.
Accessori per il controllo di un servomotore
Per poter seguire questo tutorial e controllare un servomotore avremo bisogno del seguente materiale:
Qual è la differenza tra motore, servomotore e motore passo-passo?
Prima di iniziare a collegare il nostro servomotore al nostro Raspberry Pi, diamo uno sguardo ai diversi tipi di motori convenzionalmente utilizzati in elettronica.
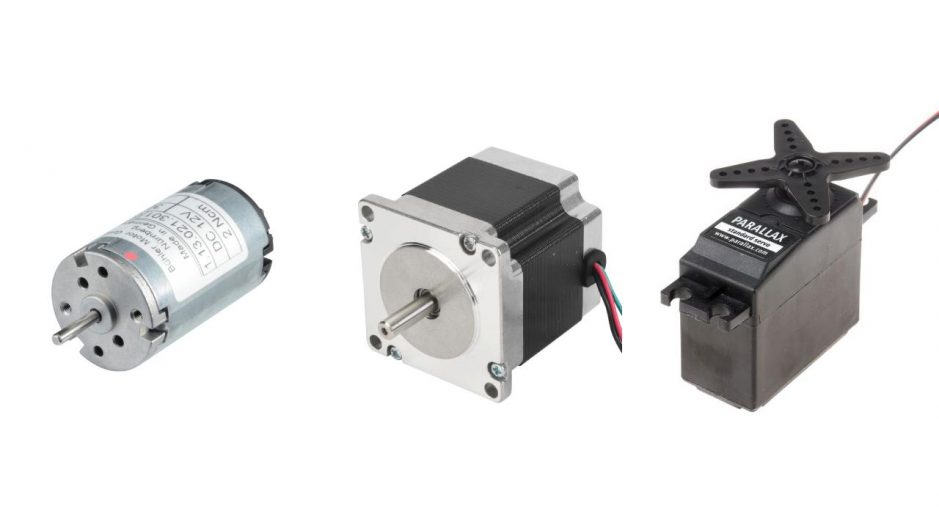
Senza entrare nei dettagli, possiamo suddividere approssimativamente i motori utilizzati nell'elettronica in tre categorie:
- Il motore: funziona finché è alimentato. È adatto quando si vuole eseguire un movimento continuo che non richiede grande precisione.
- Il motore passo-passo: gira in una sorta di piccoli balzi successivi. Vale a dire che potrai chiedergli di fare, ad esempio, 50 salti o 112 salti, che corrisponderanno a un certo movimento (ad esempio un quarto di giro). È adatto quando si desidera effettuare un movimento continuo con elevata precisione (vengono utilizzati ad esempio nelle stampanti 3D).
- Il servomotore: ruota ad un certo angolo, definito secondo un segnale di tipo PWM (Pulse Width Modulation). Spesso i piccoli motori sono limitati e non possono fare più di un giro. Sono quindi piuttosto utilizzati per un movimento breve di grande precisione.
Ci sarebbero ancora molte altre cose da dire su questi diversi motori, ma poi entreremo in questioni meccaniche che vanno ben oltre lo scopo del nostro tutorial.
Nel nostro caso utilizzeremo un servomotore perché è il motore di precisione più semplice da controllare da un Raspberry Pi.
Collega un servomotore al Raspberry Pi
La prima cosa da fare per poter utilizzare il nostro servomotore è collegarlo al Raspberry Pi.
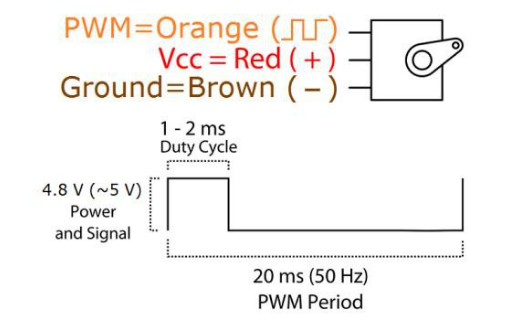
Gli attuatori hanno 3 connettori elettrici. I colori possono cambiare a seconda del produttore, ma generalmente troverai qualcosa come:
- Un filo rosso, che funge da alimentatore.
- Un filo nero o marrone, che funge da Rete Display di Google.
- Un altro filo, che viene utilizzato per trasmettere il segnale PWM controllando la posizione del motore.
Collegheremo quindi questi diversi cavi al Raspberry Pi, il filo rosso a una porta GPIO da 5 volt e il nero a una porta GND.
Per la porta PWM invece dovremo necessariamente collegarla al 12 ° pin GPIO del Raspberry Pi. In effetti, è l'unico pin GPIO che supporta un segnale PWM per impostazione predefinita.
Quindi dovresti avere un montaggio come questo.
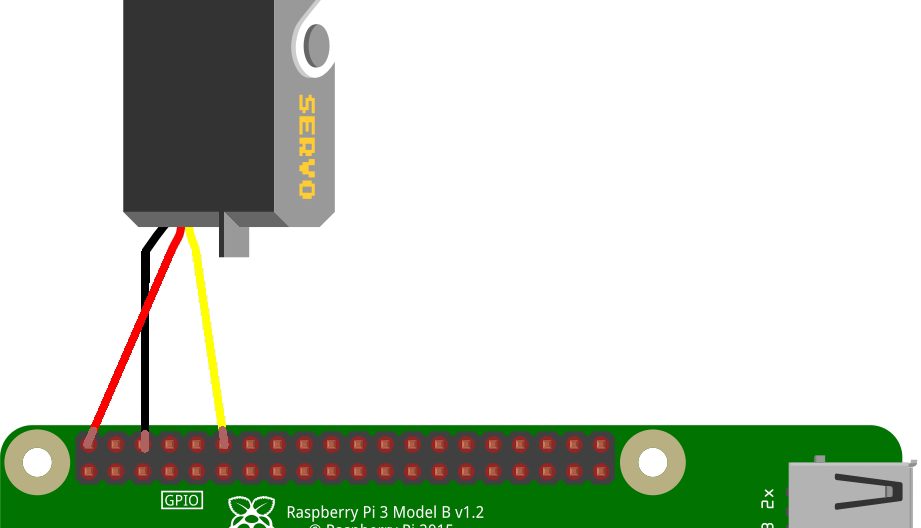
Nota, qui stiamo alimentando il nostro servomotore direttamente dal Raspberry Pi. Questo funziona perché stiamo usando un servomotore molto piccolo, ma su un modello più grande avremmo bisogno di un alimentatore dedicato.
Controllare il servomotore nelle linee di comando
Ora che abbiamo collegato il nostro servomotore, saremo in grado di pilotarlo direttamente dalla riga di comando di Raspberry Pi.
Per fare ciò, inizieremo attivando la modalità PWM sulla porta 12, ovvero GPIO 18 in base alla numerazione del processore.
gpio -o mode 18 pwm
E attiveremo la modalità Mark / Space del PWM, che permette di avere un segnale più adatto al nostro utilizzo.
gpio pwm-ms
Infine, configureremo la durata di un ciclo, le frequenze da utilizzare, ecc.
Il servomotore è impostato per funzionare a una frequenza di 50 Hz, ovvero 20 ms. Il segnale Raspberry Pi funziona a un'altra frequenza, 19,2 MHz. Usando queste due cifre, possiamo calcolare un periodo e un intervallo (grazie a ramboise314.fr per la formula):
50 = 19.2 * 10^6 / 192 / 2000
Quindi imposteremo il Raspberry Pi per utilizzare questi valori:
gpio pwmc 192 gpio pwmr 2000
Finalmente potremo far muovere il nostro motore! Nota che non passiamo un angolo al servomotore, ma un numero che verrà convertito in un angolo. Il nostro servomotore va da 0 ° a 180 °. Dopo alcune prove, sembrerebbe che 0 ° corrisponda a 230, 90 ° a 150 e 180 ° a 70.
Per inviare il nostro motore a 90 ° useremo quindi il comando:
gpio -g pwm 18 150
E sostituiremo 150 con 230 per andare a 0 °, 70 per andare a 180 ° o qualsiasi valore intermedio di cui abbiamo bisogno.
Nota, questi piccoli motori supportano un angolo di 180 ° in modo preciso, ma hanno un piccolo margine che può far sì che facciano 190 ° o 200 ° e persino che facciano un giro completo se metti un valore sufficientemente basso. È specifico per ogni modello di motore.
Guida il servomotore con Python
Come con i tutorial precedenti di questa serie, l'obiettivo è piuttosto quello di controllare il nostro motore con Python piuttosto che direttamente dalle righe di comando. Considero che ora hai le basi di Python, se non vai a leggere i tutorial precedenti, i collegamenti sono disponibili all'inizio di questo articolo.
Per controllare il nostro motore da uno script Python useremo ancora una volta lib Rpi.GPIO.
In Python e sul Pi, l'angolo del motore è calcolato come percentuale del ciclo. Questa percentuale è chiamata "Duty Cycle".
Un segnale di 0,5 ms corrisponde a 0 ° e un segnale di 2,5 ms a 180 °. Sapendo che il nostro ciclo è di 50 Hz, cioè 20ms, questo ci permette di calcolare il Duty Cycle per 0 ° e 180 ° in questo modo:
x = 0.5 / 20 y = 2.5 / 20
Troviamo quindi che il Duty Cycle corrispondente a 0 ° è 0,025, o 2,5% e che quello corrispondente a 180 ° è 0,125, o 12,5%.
Piccolo problema però, se questo valore è teoricamente buono, tende infatti ad innescare un giro completo del motore per 0 ° … Pertanto consiglio di utilizzare il 4% per 0 °. Il valore 12,5% per 180 è buono.
Per controllare il motore, dobbiamo solo impostare il pin 12 come segnale PWM e utilizzare le funzioni start e ChangeDutyCycle.
È quindi possibile creare un file servo.py e inserisci lì il codice seguente:
#!/usr/bin/env python3
#-- coding: utf-8 --
import RPi.GPIO as GPIO
import time
#Set function to calculate percent from angle
def angle_to_percent (angle) :
if angle > 180 or angle < 0 :
return False
start = 4
end = 12.5
ratio = (end - start)/180 #Calcul ratio from angle to percent
angle_as_percent = angle * ratio
return start + angle_as_percent
GPIO.setmode(GPIO.BOARD) #Use Board numerotation mode
GPIO.setwarnings(False) #Disable warnings
#Use pin 12 for PWM signal
pwm_gpio = 12
frequence = 50
GPIO.setup(pwm_gpio, GPIO.OUT)
pwm = GPIO.PWM(pwm_gpio, frequence)
#Init at 0°
pwm.start(angle_to_percent(0))
time.sleep(1)
#Go at 90°
pwm.ChangeDutyCycle(angle_to_percent(90))
time.sleep(1)
#Finish at 180°
pwm.ChangeDutyCycle(angle_to_percent(180))
time.sleep(1)
#Close GPIO & cleanup
pwm.stop()
GPIO.cleanup()Tutto quello che devi fare è eseguire lo script facendo:
python3 ./servo.pyDovresti quindi vedere il tuo motore avviarsi a 0 °, quindi passare a 90 ° e infine fermarsi a 180 °.
Tutto quello che devi fare è adattare questo script alle tue esigenze!
